Beekhoverstraat 10
6166 AC Geleen
tel: 046-475 21 24
info@laveaux.org
|
|
Laveaux Software Engineering BV Beekhoverstraat 10 6166 AC Geleen tel: 046-475 21 24 info@laveaux.org |
| Home Projecten | |
|
Projecten machine besturing Projecten datacollectie Projecten infratechniek Projecten robots |
Studie lasrobot traplift Dit project betrof het onderzoeken van de mogelijkheid delen van een traplift automatisch met een robot te lassen. Iedere traplift is een unikaat, aangepast aan de trap waar de lift gebruikt wordt. Doel van het project was aantonen dat deze delen met een robot te lassen zijn. De delen bestaan uit een buis, met daaraan gelast een vlag met perforaties. Buis en vlag worden op maat gemaakt met een buigmachine. De buigmachine krijgt een lijst met coördinaten, en buigt daarmee de delen. Met dit project is aangetoond dat het mogelijk is dezelfde lijst te gebruiken voor het automatisch genereren van een robotprogramma.
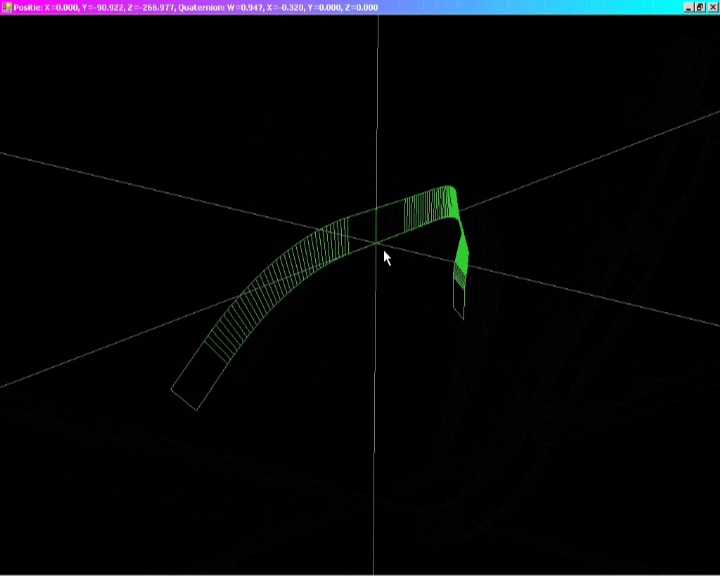
In onderstaande demonstratievideo is te zien dat een excel lijst met coördinaten wordt gelezen. Met deze coördinaten wordt een 3 dimensionaal model gemaakt van de vlag. Dit model wordt gemanipuleerd zodanig dat het te lassen punt in de oorsprong van het assenstelsel ligt. In de oorsprong van het assenstelsel staan twee lasmachines die de vlag en buis elk aan een zijde aan elkaar lassen. De robot heeft de vlag vast aan een uiteinde van de vlag.
|